
Page 53 - 理化检验-物理分册2024年第七期
P. 53
姚 武,等:新型全自动汽车转向参数检测仪校准装置
2 校准方法
采用两种方法进行校准,具体过程如表3所示。
采用砝码校准转向力、力矩,该方法的优点是精度
高、数据稳定、不受干扰、重复性好等,缺点是结构
体积大、自动加载控制复杂等。采用光栅式、光栅
尺编码器校准转向角的重复性为0.1%,允许误差为
图 2 三爪式力值型检测仪外观 0.01%,灵敏度为0.1%,满足标准要求。
表1 JJF 1196—2008对转向参数的规定
测量参数 测量范围 最大允许误差 重复性 分度值 鉴别力/d 漂移/(d · min )
-1
转向力 100~500 N ±3% 3% ≤1 N 1.5 2
转向力矩 20~100 N · m ±3% 3% ≤0.2 N · m 1.5 2
转向角 -1 080°~1 080° ±3° 3° 1° — 2
表2 GB/T 34592—2017对转向参数的规定
测量参数 测量范围 最大允许误差 重复性 分度值 鉴别力/d 漂移/(d · min )
-1
转向力 -500~500 N ±2% 2% ≤1 N 1.5 2
转向力矩 20~100 N · m ±2% 2% ≤0.2 N · m 1.5 2
转向角 -1 080°~1 080° ±2° 2° 1° 1.0 2
表3 校准方法 3.1 转向力校准结构
校准参数 方法1 方法2 采用砝码吊挂结构,5 个质量为 2 kg的砝码,
砝码校准,若干组砝码组合, 测力仪校准,高等级 4 个质量为 10 kg的砝码,其中力F的计算方法如
转向力
按量程设置进行配合校准 精度的传感器 式(1)所示 。
[2]
组合校准,允许误差为 F=M(1-ρ /ρ ) (1)
转向力矩 扭矩传感器校准 a w
±0.5 mm
式中:M为砝码质量;F为砝码产生的力;ρ 为空气
角度规校准,允许误 a
转向角 编码器校准,误差为0.1% 密度;ρ 为砝码材料的密度。
差为±30′ w
砝码挂具上部的设计为半圆弧反向架结构,砝
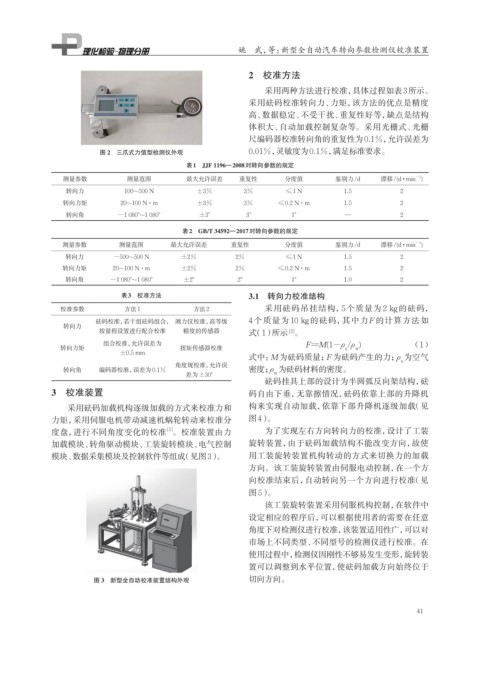
3 校准装置 码自由下垂,无靠擦情况,砝码依靠上部的升降机
采用砝码加载机构逐级加载的方式来校准力和 构来实现自动加载,依靠下部升降机逐级加载(见
力矩,采用伺服电机带动减速机蜗轮转动来校准分 图4)。
度盘,进行不同角度变化的校准 。校准装置由力 为了实现左右方向转向力的校准,设计了工装
[1]
加载模块、转角驱动模块、工装旋转模块、电气控制 旋转装置,由于砝码加载结构不能改变方向,故使
模块、数据采集模块及控制软件等组成(见图3)。 用工装旋转装置机构转动的方式来切换力的加载
方向。该工装旋转装置由伺服电动控制,在一个方
向校准结束后,自动转向另一个方向进行校准(见
图5)。
该工装旋转装置采用伺服机构控制,在软件中
设定相应的程序后,可以根据使用者的需要在任意
角度下对检测仪进行校准,该装置适用性广,可以对
市场上不同类型、不同型号的检测仪进行校准。在
使用过程中,检测仪因刚性不够易发生变形,旋转装
置可以调整到水平位置,使砝码加载方向始终位于
图 3 新型全自动校准装置结构外观 切向方向。
41