
Page 25 - 理化检验-物理分册2022年第二期
P. 25
凃应宏, 等: ISO10113 : 2020 标准中若干技术问题的验证
综上所述, 人工测试r 值偏低的原因除了试样
Δb 1 卸 L IJ
e b 人工 = = ( 1 )
b 0 L FJ 的不均匀变形外, 还有可能是横向引伸计无法适应
当 采 用 横 向 引 伸 计 测 试 时, 试 验 前 L e=2× 试样的偏转。除非采用自动装夹机械手, 否则对于
, 因此引伸计的横向 人工装夹试样, 全自动引伸计未能很好地解决这一
L FJ , 停机时刻 Δ b 1 加 =2×L TK
应变为 问题。
Δb 1 加 L TK 除了横向测试外, 自动引伸计还存在纵向标距
e b 引伸计 = = ( 2 )
L e L FJ 的准确性和稳定性问题。为了灵活地调节标距
L e
扣除, 则 Δ b 1 加 -Δb弹性 =
如果将弹性变形 L TH , 该类引伸计采用了特殊的杠杆式平衡结构。客
L e
, 引伸计横向应变可修正为
2×L HK 的准确性和稳定性并没有带插销的手
观地说, L e
L HK 与理想值存在偏离,
e b 塑性 = ( 3 ) 动引伸计高, 只要纵向标距 L e
就会产生纵向变形的测试误差, 更严重的是会造成
L FJ
可见, 在试样纵轴发生偏转的情况下, 即便扣除
指向性错误, 从而扭曲纵向和横向变形两者之间的
弹性应变, 由于
对应关系, 这也是r 值数据波动的原因之一。
L HK L IJ 偏差对r 值测定
> ( 4 ) 为了说明纵向引伸计标距 L e
L FJ L FJ
的影响, 假设存在编号为 B~F 的 5 支纵向引伸计,
在理论上都无法确保e b 塑性 =e b 人工 , 如果不扣除
均为 50mm , 其中 C , E 为 0.5 级引
弹性应变, 则 其名义标距 L e
伸计, B , F 为 1 级引伸计。如果使用的是编号 F 的
L TK L HK L IJ
> > ( 5 ) 1 级引伸计, 由于标距存在负偏差 -1.0% , 那么其
L FJ L FJ L FJ
与此同时, 试样的偏转不会对纵向引伸计的测 实际标距 L e ″ 为 49.5 mm 。经推算可知, 编号 F 引
试造成类似影响, 这是由于纵向、 横向应变测试对原 伸计测得的 15% 应变与实际情况存在一定偏离, 此
时试样的实际变形应为 15.15% ( 见表 3 , Δ L 为试样
的定义不同, 因此卸载后人工测得的试
始标距 L e
样长度方向应变e L 人工 与引伸计测得的试样长度方 长度变形量)。
偏差所导致的指向异常
向应变e L 引伸计 较为接近。但对于横向应变, 人工测
表 3 纵向引伸计 L e
得的e b 人工 比引伸计测得的纵向应变e b引伸计 低, 即使 编号 引伸计 标距相对 理想 ΔL /实际标距 / 试样纵向
级别 误差 / % mm mm 实际应变 / %
考虑弹性应变的影响, 大部分的e b 人工 也比e b 引伸计 低
B 1 1.0 7.5 50.5 14.85
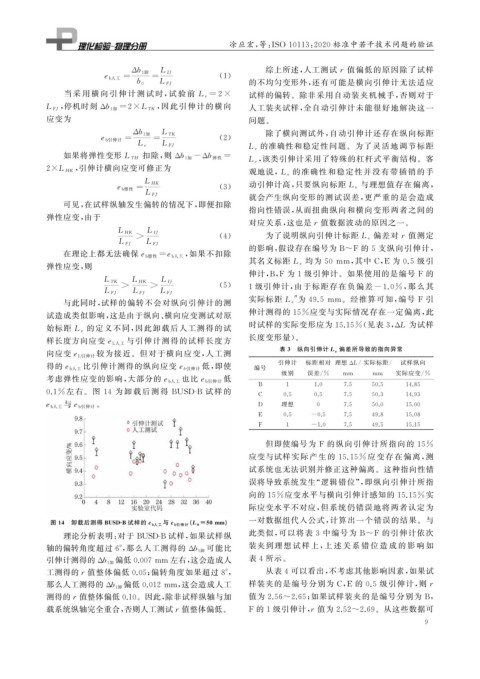
0.1% 左右。图 14 为 卸 载 后 测 得 BUSD-B 试 样 的 C 0.5 0.5 7.5 50.3 14.93
e b 人工 与e b 引伸计 。 D 理想 0 7.5 50.0 15.00
E 0.5 -0.5 7.5 49.8 15.08
F 1 -1.0 7.5 49.5 15.15
但即使编号为 F 的纵向引伸计所指向的 15%
应变与试样实际产生的 15.15% 应变存在偏离, 测
试系统也无法识别并修正这种偏离。这种指向性错
误将导致系统发生“ 逻辑错位”, 即纵向引伸计所指
向的 15% 应变水平与横向引伸计感知的 15.15% 实
际应变水平不对应, 但系统仍错误地将两者认定为
图 14 卸载后测得 BUSD-B 试样的e b 人工 与e b 引伸计 ( L 0 =50mm ) 一对数据组代入公式, 计算出一个错误的结果。与
理论分析表明: 对于 BUSD-B 试样, 如果试样纵 此类似, 可以将表 3 中编号为 B~F 的引伸计依次
轴的偏转角度超过 6° , 那么人工测得的 Δb 1 卸 可能比 装夹到理 想 试 样 上, 上 述 关 系 错 位 造 成 的 影 响 如
引伸计测得的 Δb 1 加 偏低0.007mm 左右, 这会造成人 表 4 所示。
从表 4 可以看出, 不考虑其他影响因素, 如果试
工测得的r 值整体偏低 0.05 ; 偏转角度如果超过 8° ,
那么人工测得的 Δb 1 卸 偏低 0.012mm , 这会造成人工 样装夹的是编号分别为 C , E 的 0.5 级引伸计, 则r
测得的r 值整体偏低0.10 。因此, 除非试样纵轴与加 值为 2.56~2.65 ; 如果试样装夹的是编号分别为 B ,
载系统纵轴完全重合, 否则人工测试r 值整体偏低。 F 的 1 级引伸计, r 值为 2.52~2.69 。从这些数据可
9