
Page 20 - 理化检验-物理分册 2021年第六期
P. 20
高怡斐, 等: 拉伸试验方法 A2 的横梁位移速率补偿方法
· d e Δ e 2.2 横梁位移速率补偿方法
e p , m = dt m ( 17 ) 使用方法 A2 进行拉伸试验时, 由于试验机系
≅
Δt
m
并不全部转移成平
统也产生变形, 横梁位移速率v c
行长度系统的伸长速率, 总有部分被分流成为试验
机系统的伸长速率。为了补偿被分流了的这部分横
梁位移速率, 需要寻找出横梁位移速率的补偿方法,
下面考虑这一问题。
拉伸
设想用下式给定的已知横梁位移速率 v c
整个试样链系统:
·
( 22 )
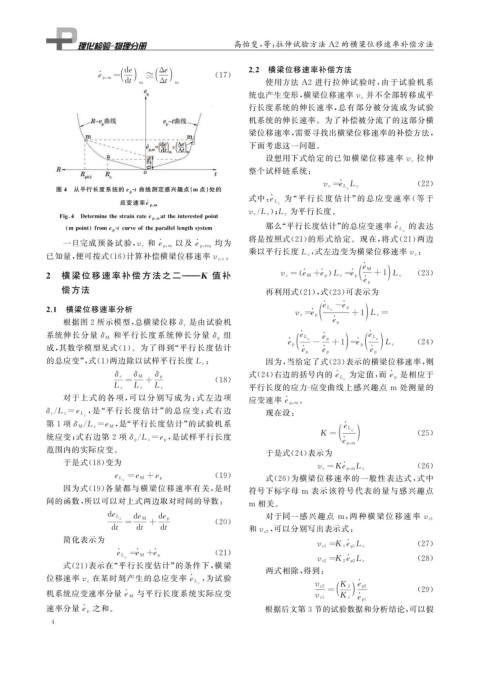
图 4 从平行长度系统的e p -t 曲线测定感兴趣点( m 点) 处的 v c= e L L c
c
·
· 式中: e L 为 “ 平 行 长 度 估 计” 的 总 应 变 速 率 ( 等 于
应变速率 e p , m c
/ ); 为平行长度。
Fi g 4 Determinethestrainrate e p m attheinterestedp oint v c L c L c
·
的表达
mp oint frome p -tcurveofthe p arallellen g ths y stem 那么“ 平行长度估计” 的总应变速率e L
c
· · 将是按照式( 21 ) 的形式给定。现在, 将式( 21 ) 两边
均为
一旦完成预备试验, v c 和e p , m 以及e p , re q
:
乘以平行长度 L c , 式左边变为横梁位移速率v c
。
已知量, 便可按式( 16 ) 计算补偿横梁位移速率v c , c
·
· · · e M
2 横梁位移速率补偿方法之二——— K 值补 v c= e M + e p L c= e p ( 23 )
· +1 L c
e p
偿方法 再利用式( 21 ), 式( 23 ) 可表示为
· ·
2.1 横梁位移速率分析 · e L - e p
c
v c= e p +1 L c=
·
是由试验机
根据图 2 所示模型, 总横梁位移δ c e p
· ·
组 ·
系统伸长分量δ M 和平行长度系统伸长分量δ p · e L c e p · e L c ( 24 )
成, 其数学模型见式( 1 )。为了得到“ 平行长度估计 e p · - · +1 = e p · L c
e p e p e p
: 因为, 当给定了式( 23 ) 表示的横梁位移速率, 则
的总应变”, 式( 1 ) 两边除以试样平行长度 L c
· · 是相应于
δ c δ M δ p 式( 24 ) 右边的括号内的e L 为定值, 而e p
= + ( 18 ) c
平行长度的应力 - 应变曲线上感兴趣点 m 处测量的
L c L c L c
对于上式的各项, 可以分别写成 为: 式 左边项 · 。
应变速率e p , m
/ , 是 “ 平行长度估计” 的总 应 变; 式 右 边
δ c L c=e L 现在设:
c
/ , 是“ 平行长度估计” 的试验机系 ·
第 1 项δ M L c=e M
e L c
/ , 是试样平行长度 K = ( 25 )
·
统应变; 式右边第 2 项δ p L c=e p
e p , m
范围内的实际应变。
于是式( 24 ) 表示为
于是式( 18 ) 变为 ·
v c=Ke p , m L c ( 26 )
( 19 )
e L = e M + e p 式( 26 ) 为横梁位移速率的一般性表达式, 式中
c
因为式( 19 ) 各量都与横梁位移速率有关, 是时 符号下标字母 m 表示该符号代表的量与感兴趣点
间的函数, 所以可以对上式两边取对时间的导数:
m 相关。
d e L
c de M de p 对于同一感兴趣点 m , 两种横梁位移速率 v c1
= + ( 20 )
dt dt dt , 可以分别写出表示式:
和v c2
简化表示为 ·
v c1 = K 1 e p 1 L c ( 27 )
· · ·
( 21 )
e L = e M + e p ·
c ( 28 )
v c2 = K 2 e p 2 L c
式( 21 ) 表示在“ 平行长度估计” 的条件下, 横梁
两式相除, 得到:
·
位移速率v c 在某时刻产生的总应变率e L , 为试验 ·
c
v c2 K 2 e p 2
· = ( 29 )
与平行长度系统实际应变 ·
机系统应变速率分量e M
v c1
K 1 e p 1
·
之和。 根据后文第3节的试验数据和分析结论, 可以假
速率分量e p
4