
Page 18 - 理化检验-物理分册 2021年第六期
P. 18
高怡斐, 等: 拉伸试验方法 A2 的横梁位移速率补偿方法
为试样平行长度的拉伸应变( 通过引伸计
式中: e p
1 横梁位移速率补偿方法之一———斜率补 系统测定); L c 为试样平行长度。
偿法
1.1 拉伸试验模型
对金属材料进行拉伸试验, 其实是试样在拉伸
试验系统中被拉伸的过程。所谓拉伸试验系统是指
能够沿试样纵轴对试样链施加拉伸力的系统, 试样
链由试验机夹头、 试样、 拉杆、 力传感器等串联组成,
试样仅仅是构成试样链的一环。由于拉伸试验系统
自身的变形特性, 试验机的横梁位移并不是全部转
移到试样产生变形, 而是有部分被转移到试验机构
件自身产生变形。基于这种认识, 把试样在拉伸试
验系统中进行的拉伸试验, 看成为代表试验机的一
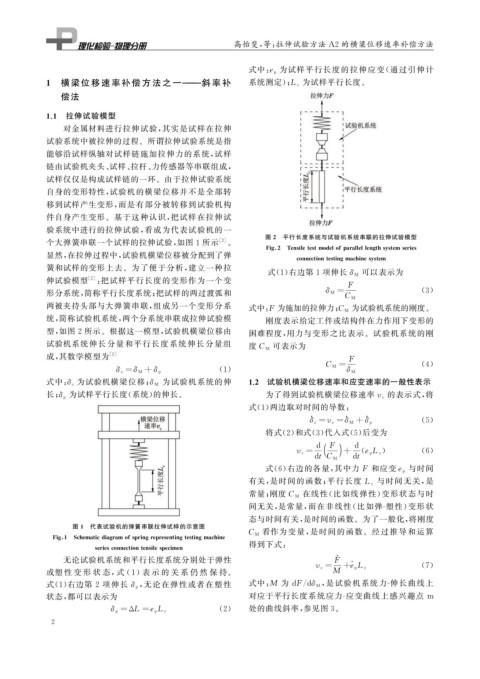
图 2 平行长度系统与试验机系统串联的拉伸试验模型
个大弹簧串联一个试样的拉伸试验, 如图 1 所示 [ 2 ] 。
Fi g 2 Tensiletestmodelof p arallellen g ths y stemseries
显然, 在拉伸过程中, 试验机横梁位移被分配到了弹
connectiontestin gmachines y stem
簧和试样的变形上去。为了便于分析, 建立一种拉
式( 1 ) 右边第 1 项伸长δ M 可以表示为
伸试验模型 [ 2 ] : 把试样平行长度的变形作为一个变
F
形分系统, 简称平行长度系统; 把试样的两过渡弧和 δ M = ( 3 )
C M
两被夹持头部与大弹簧串联, 组成另一个变形分系
式中: F 为施加的拉伸力; C M 为试验机系统的刚度。
统, 简称试验机系统, 两个分系统串联成拉伸试验模 刚度表示给定工件或结构件在力作用下变形的
型, 如图 2 所示。根据这一模型, 试验机横梁位移由 困难程度, 用力与变形之比表示。试验机系统的刚
试验机系统伸长分量和平行长度系统伸长 分量组 可表示为
度 C M
成, 其数学模型为 [ 2 ] F
C M = ( 4 )
( 1 )
δ c= δ M + δ p δ M
为试验机系统的伸 1.2 试验机横梁位移速率和应变速率的一般性表示
式中: δ c 为试验机横梁位移; δ M
为试样平行长度( 系统) 的伸长。 的表示式, 将
长; δ p 为了得到试验机横梁位移速率v c
式( 1 ) 两边取对时间的导数:
· · ·
( 5 )
δ c= v c= δ M + δ p
将式( 2 ) 和式( 3 ) 代入式( 5 ) 后变为
d F d
v c= + ( e p L c ) ( 6 )
dtC M dt
与时间
式( 6 ) 右边的各量, 其中力 F 和应变 e p
与时间无关, 是
有关, 是时间的函数; 平行长度 L c
在线性( 比如线弹性) 变形状态与时
常量; 刚度 C M
间无关, 是常量, 而在非线性( 比如弹 - 塑性) 变形状
态与时间有关, 是时间的函数。为了一般化, 将刚度
图 1 代表试验机的弹簧串联拉伸试样的示意图
看作为变量, 是时间的函数。经过推导和运算
C M
Fi g 1 Schematicdia g ramofs p rin g re p resentin g testin gmachine
得到下式:
seriesconnectiontensiles p ecimen
·
无论试验机系统和平行长度系统分别处于弹性 F ·
v c= + e p L c ( 7 )
或塑 性 变 形 状 态, 式 ( 1 ) 表 示 的 关 系 仍 然 保 持。 M
, 无论在弹性或者在塑性 , 是试验机系统力 - 伸长曲线上
式( 1 ) 右边第 2 项伸长δ p 式中: M 为 dF / d δ M
状态, 都可以表示为 对应于平行长度系统应力 - 应变曲线上感兴趣点 m
( 2 ) 处的曲线斜率, 参见图 3 。
δ p =Δ L = e p L c
2