
Page 19 - 理化检验-物理分册 2021年第六期
P. 19
高怡斐, 等: 拉伸试验方法 A2 的横梁位移速率补偿方法
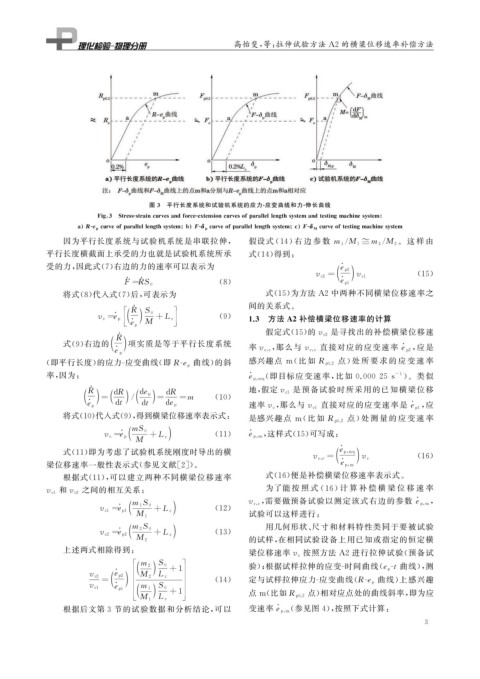
图 3 平行长度系统和试验机系统的应力 - 应变曲线和力 - 伸长曲线
Fi g 3 Stress-straincurvesandforce-extensioncurvesof p arallellen g ths y stemandtestin gmachines y stem
a R-e p curveof p arallellen g ths y stem b F-δ p curveof p arallellen g ths y stem c F-δ M curveoftestin gmachines y stem
/
/
因为平行长度系统与试验机系统是串联拉伸, 假设式 ( 14 ) 右 边 参 数 m 1 M 1 ≅m 2 M 2 。 这 样 由
平行长度横截面上承受的力也就是试验机系统所承 式( 14 ) 得到:
受的力, 因此式( 7 ) 右边的力的速率可以表示为 e p 2
·
v c2 = ( 15 )
·
· · v c1
( 8 )
F = RS 0 e p 1
将式( 8 ) 代入式( 7 ) 后, 可表示为 式( 15 ) 为方法 A2 中两种不同横梁位移速率之
· 间的关系式。
· R S 0
( 9 )
v c= e p · +L c 1.3 方法 A2 补偿横梁位移速率的计算
M
e p
是寻找出的补偿横梁位移速
· 假定式( 15 ) 的v c2
R
式( 9 ) 右边的 项实质是等于平行长度系统 · , 应是
·
e p 率v c , c , 那么与 v c , c 直接对应的应变速率 e p 2
曲线) 的斜 感兴趣点 m ( 比 如 R p 0.2 点) 处 所 要 求 的 应 变 速 率
( 即平行长度) 的应力 - 应变曲线( 即 R-e p
·
率, 因为: ( 即目标应变速率, 比如 0.00025s )。类似
-1
e p , re q
· 是预备试验时所采用的已知横梁位移
R d R d e p d R 地, 假定v c1
= =m ( 10 ) ·
=
/
·
dt
dt
e p de p , 应
速率v c , 那么与v c1 直接对应的应变速率是e p 1
将式( 10 ) 代入式( 9 ), 得到横梁位移速率表示式: 点) 处 测 量 的 应 变 速 率
是感兴趣 点 m ( 比 如 R p 0.2
· mS 0 ·
M
v c= e p ( 11 ) e p , m , 这样式( 15 ) 可写成:
+L c
·
式( 11 ) 即为考虑了试验机系统刚度时导出的横 e p , re q
v c , c= v c ( 16 )
·
梁位移速率一般性表示式( 参见文献[ 2 ])。 e p , m
根据式( 11 ), 可以建立两种不同横梁位移速率 式( 16 ) 便是补偿横梁位移速率表示式。
为了能 按 照 式 ( 16 ) 计 算 补 偿 横 梁 位 移 速 率
之间的相互关系:
v c1 和v c2
·
,
· m 1 S 0 v c , c , 需要做预备试验以测定该式右边的参数e p , m
( 12 )
v c1 = e p 1 +L c
M 1 试验可以这样进行:
用几何形状、 尺寸和材料特性类同于要被试验
· m 2 S 0
( 13 )
v c2 = e p 2 +L c
M 2 的试样, 在相同试验设备上用已知或指定的恒定横
上述两式相除得到: 按照方法 A2 进行拉伸试验( 预备试
梁位移速率v c
m 2 S 0 验); 根据试样拉伸的应变 - 时间曲线( e p -t 曲线), 测
· +1
v c2 e p 2 L c ( 14 ) 曲线) 上感兴趣
M 2
v c1 定与试样拉伸应力 - 应变曲线( R-e p
=
·
m 1 S 0
+1 点 m ( 比如 R p 0.2 点) 相对应点处的曲线斜率, 即为应
M 1 L c
e p 1
·
根据后文第 3 节的试验数据和分析结论, 可以 变速率e p , m ( 参见图 4 ), 按照下式计算:
3