
Page 75 - 理化检验-化学分册2017第八期
P. 75
孙宝瑞, 等: 关节轴承衬垫摩擦性能试验机结构设计与运动分析
为周期方波, 大小为 16.8kN ; 往复运动传感器测量
值为周期曲线, 以最大力为 25kN 开始逐渐减小,
减小到 15kN 时停止减小, 在反方向达到最大值.
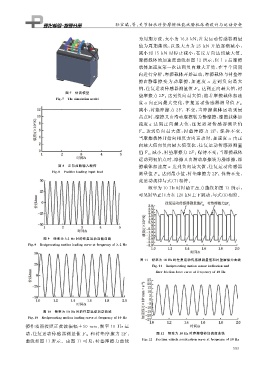
摩擦载体的加速度曲线如图 12 所示, 以 1s后摩擦
载体加速度第一次达到负向最大开始, 在半个周期
内进行分析, 摩擦载体开始运动, 摩擦载体与衬垫摩
擦由静摩 擦 变 为 动 摩 擦, 加 速 度 a 达 到 负 向 最 大
值, 往复运动传感器测量值 Fm 达到正向最大值, 衬
图 7 仿真模型
垫摩擦力 2 F 1 达到负向最大值; 随着摩擦载体加速
Fi g 敭7 Thesimulationmodel
度a 向正向最大变化, 往复运动传感器测量值 Fm
减小, 衬垫摩擦力 2F 1 不变, 当摩擦载体运动到最
高点时, 摩擦又由滑动摩擦转为静摩擦, 摩擦载体加
速度a 达 到 正 向 最 大 值, 往 复 运 动 传 感 器 测 量 值
Fm 达到负 向 最 大 值, 衬 垫 摩 擦 力 2F 1 保 持 不 变.
当摩擦载体开始向相反方向运动时, 加速度a 由正
向最大值向负向最大值变化, 往复运动传感器测量
值 Fm 减小, 衬垫摩擦力 2 F 1 保持不变; 当摩擦载体
运动到初始点时, 摩擦又由滑动摩擦转为静摩擦, 摩
图 8 正向加载输入载荷 擦载体加速度a 达到负向最大值, 往复运动传感器
Fi g 敭8 Positiveloadin g in p utload 测量值 Fm 达到最小值, 衬垫摩擦力 2 F 1 保持不变,
此运动规律与式( 7 ) 相符.
频率为10Hz时衬垫正压力曲线如图 13 所示,
可见衬垫正压力在120kN 上下跳动, 与式( 8 ) 相符.
图 9 频率为 3.2Hz时的往复运动加载曲线
Fi g 敭9 Reci p rocatin gmotionloadin g curveatfre q uenc y of3敭2Hz
图 11 频率为 10Hz时往复运动传感器测量值和衬垫摩擦力曲线
Fi g 敭11 Reci p rocatin gmotionsensorindicationand
linerfrictionforcecurveatfre q uenc y of10Hz
图 10 频率为 10Hz时的往复运动加载曲线
Fi g 敭10 Reci p rocatin gmotionloadin g curveatfre q uenc y of10Hz
擦作动器按照正弦波振幅 ±50mm 、 频率 10 Hz运
图 12 频率为 10Hz时摩擦载体加速度曲线
动, 往复运动传感器测量值 Fm 和衬垫摩擦力 2F 1
曲线如图 11 所示.由图 11 可见: 衬垫摩擦力曲线 Fi g 敭12 Frictionvehicleaccelerationcurveatfre q uenc y of10Hz
5 8 3