
Page 76 - 理化检验-化学分册2017第八期
P. 76
孙宝瑞, 等: 关节轴承衬垫摩擦性能试验机结构设计与运动分析
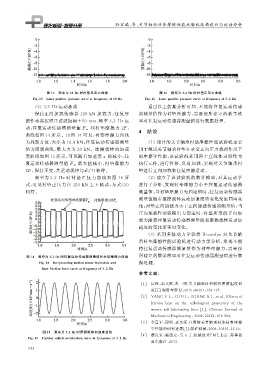
图 13 频率为 10Hz时衬垫正压力曲线 图 16 频率为 3.2Hz时衬垫正压力曲线
Fi g 敭13 Liner p ositive p ressurecurveatfre q uenc y of10Hz Fi g 敭16 Liner p ositive p ressurecurveatfre q uenc y of3敭2Hz
( 2 ) 3.2Hz运动加载 通过以上仿真分析可知, 不能将往复运动传感
保持正向加载传感器 120kN 加 载力, 往复摩 器测量值作为衬垫摩擦力, 需要按所建立的数学模
擦作动器按照正弦波振幅 ±50mm 、 频率 3.2Hz运 型对往复运动传感器测量值进行数据处理.
4 结论
动, 往复运动传感器测量值 Fm 和衬垫摩擦力 2 F 1
曲线如图 14 所示.由图 14 可见: 衬垫摩擦力曲线
为周期方波, 大小为 16.8kN ; 往复运动传感器测量 ( 1 )设计的关节轴承衬垫摩擦性能试验机主要
值为周期曲线, 最大力为 20kN .摩擦载体的加速 用于测试关节轴承衬垫在承受正向压力载荷作用下
度曲线如图 15 所示, 可见随着加速度a 的减小, 往 的摩擦学性能, 该试验机采用两个直线作动器作为
复运动传感器测量值 Fm 最大值减小, 衬垫摩擦力 执行元件, 进行位移、 负荷加载, 实现对关节轴承衬
2 F 1 保持不变, 其运动规律与式( 7 ) 相符. 垫进行正向加载和往复摩擦运动.
频率为 3.2 Hz 时 衬 垫 正 压 力 曲 线 如 图 16 所 ( 2 )建立了该试验机的数学模型, 对其运动学
式, 可见衬垫正压力在 120kN 上下跳动, 与式( 8 ) 进行了分析, 发现衬垫摩擦力小于往复运动传感器
相符. 测量值, 当衬垫摩擦力为固定值时, 往复运动传感器
测量值随着摩擦载体运动加速度的变化发生同向变
化; 衬垫正向加载力小于正向加载传感器测量值, 当
正向加载作动器输出力固定时, 衬垫所受的正向加
载力随着往复运动传感器测量值和摩擦载体运动加
速度的变化而实时变化.
( 3 )采用多体动力学软件 Recurd y n 对关节轴
承衬垫摩擦性能试验机进行动力学分析, 发现不能
将往复运动传感器测量值作为衬垫摩擦力, 需要按
图 14 频率为 3.2Hz时往复运动传感器测量值和衬垫摩擦力曲线 所建立的数学模型对往复运动传感器测量值进行数
Fi g 敭14 Reci p rocatin gmotionsensorindicationand 据处理.
linerfrictionforcecurveatfre q uenc y of3敭2Hz
参考文献:
[ 1 ] 江煜, 李文辉, 杜三明 . 关节轴承衬垫材料摩擦温度研
究[ J ] . 润滑与密封, 2015 , 40 ( 9 ): 124G127.
[ 2 ] YANG YL , ZUDL , ZHANGRJ , etal.Effectsof
friction heat on the tribolo g ical p ro p erties ofthe
wovenselfGlubricatin gliner [ J ] .ChineseJournalof
MechanicalEn g ineerin g , 2009 , 22 ( 6 ): 918G924.
[ 3 ] 李喜军, 邱明, 袁文征 . 自润滑关节轴承衬垫材料摩擦
学性能的研究进展[ J ] . 煤矿机械, 2009 , 30 ( 9 ): 12G15.
图 15 频率为 3.2Hz时摩擦载体加速度曲线
[ 4 ] 濮良贵, 陈国定, 吴立言 . 机械设计[ M ] . 北京: 高等教
Fi g 敭15 Frictionvehicleaccelerationcurveatfre q uenc y of3敭2Hz
育出版社, 2013.
5 8 4