
Page 18 - 理化检验-物理分册2022年第四期
P. 18
徐魁龙, 等: 全自动冲击试验机在液化天然气储罐用钢上的应用
④ 人工记录试验结果时, 无法完全避免登记错误。 差控制 为 ±0.165 mm , 比 手 动 送 样 的 距 离 公 差
随着自动化、 信息化、 智能化技术的不断发展, ±0.42mm 要严格很多; 另一方面, 如果试 样 端 面
近十几年来, 冲击试验方法发展很快, 自动化冲击试 上的毛刺、 冲击试验机砧座上黏结的毛刺未被清除
验机也越来越多地应用在钢 厂、 检测机构等领域。 干净, 都会影响到试样的定位精度。
笔者对目前市面上常见的两类自动化冲击试验机进 ( 4 )试验效率较低。推杆式全自动冲击试验机
行了对 比, 并 分 析 其 优 缺 点, 测 试 了 液 化 天 然 气 的试验效率较低, 这主要有两方面的原因: ① 每次
( LNG ) 储罐用钢的冲击性能。 保温的冲击试样数量一般不会超过 40 件, 低温室的
空间尺寸较低温槽等冷却系统的容量要小很多; ②
1 推杆式全自动冲击试验机
按照 GB / T229-2020 标准的要求, 如果采用气体
推杆式全自动冲击试验机的工作原理为: 将试 方式进行冷却, 试样在规定温度下的保温时间不低
样装入可拆卸试样架上, 试验机启动后, 自动送样系 于 30 min , 而 液 体 介 质 中 的 保 温 时 间 只 要 大 于
统的气缸将试样架上的试样逐个推入低温装置内, 5min即可。推杆式全自动冲击试验机温度控制系
待试样完成降温、 保温后, 由另外一组气缸将试样送 统如图 1 所示。
至试验机砧座上, 试验机自动完成放摆冲击, 并记录
试验结果。整个试验过程由微机发出指令, 无需人
员介入。
除了全程可自动化控制外, 推杆式全自动冲击
试验机的优势在于其冷却系统。该装置的低温室分
为两半, 中间夹层为试样空间, 上下两层均由热传导
较快的紫铜板制成, 紫铜板中开蛇形管道, 冷却剂通
过蛇形管道时吸收热量, 从而达到冷却低温室中试
图 1 推杆式全自动冲击试验机温度控制系统示意
样的目的。这种结构设计可保证低温室中温度的稳
定性, 由于采用的冷却介质是空气, 其不会在低温下 2 智能机器人全自动冲击试验机
凝固, 因此能够获得较低的试验温度, 采用合适的冷
[ 3 ]
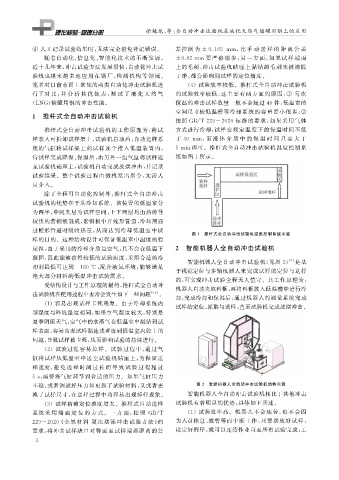
智能机器人全自动冲击试验机( 见图 2 ) 是基
却剂最低可达到 -180 ℃ , 配合液氮环境, 能够满足
于视觉定位与多轴机器人来完成试样的定位与送样
绝大部分材料的低温冲击试验需求。
的, 可实现冲击试验全程无人值守。其工作原理为:
受结构设计与工作原理的制约, 推杆式全自动冲
机器人自动夹取料框, 再将料框放入低温槽中进行冷
击试验机在使用过程中也常会发生如下一些问题 [ 3-4 ] 。
却, 完成冷却和保温后, 通过机器人的视觉系统完成
( 1 )容易出现试样卡死现象。由于冷却系统内
试样的定位、 抓取与送样, 直至试验机完成放摆冲击。
部湿度与环境湿度相同, 如果空气湿度较大, 特别是
夏季阴雨天气, 空气中的水蒸气在低温室中凝结到试
样表面, 容易出现试样黏连或者冻到低温室内腔上的
问题, 导致试样被卡死, 从而影响试验的持续进行。
( 2 )试验过程容易掉样。试验过程中, 通过气
缸将试样从低温室中送至试验机砧座上, 为保证送
样速度, 避 免 送 样 时 间 过 长 而 导 致 试 验 过 程 超 过
5s , 需要将气缸调节到合适的压力。如果气缸压力
不稳, 或者调试好压力却更换了试验材料, 又或者更 图 2 智能机器人全自动冲击试验机结构示意
换了试样尺寸, 在送样过程中均容易出现掉样现象。 智能机器人全自动冲击试验机相比于其他冲击
( 3 )试样精确定位难度增大。推杆式自动送样 试验机有着明显的优势, 具体如下所述。
( 1 )试验效率高。机器人不会疲劳, 也不会因
系统采 用 端 面 定 位 的 方 式。 一 方 面, 按 照 GB / T
229-2020 《 金属材料 夏比摆锤冲击试验方法》 的 为人员休息、 就餐等而中断工作, 只要摆放好试样,
要求, 将冲击试样缺口对称面至试样端部距离的公 设定好程序, 就可以连续作业直至所有试验完成, 工
2