
Page 27 - 理化检验-物理分册2021年第二期
P. 27
贾金龙, 等: 普通螺母及自锁螺母对螺栓标定特征曲线的影响
力 [ 5-8 ] 。螺栓在拧紧过程中自身会伸长, 同时产生轴 F E· S· v 0
= ( 6 )
向拉应力, 超声波脉冲从螺栓的头部传向尾部, 由于 Δt 2 ( L 1 +E· L 0 A )
·
介质密度的突变会沿原路径返回, 在螺栓表面通过 由式( 6 ) 可以看出在弹性阶段, 螺栓的轴向力与
压电陶瓷接收信号后产生时间差 Δ t 。超声波测试 超声波的声时差成正比。对于给定的螺栓, 轴向力
原理图如图 1 所示, 时间差与伸长量成正比关系。 与声时差的比值是定值, 因此可以通过前期标定获
得螺栓轴向力与超声波声时差的线性特征关系。依
此原理, 以下设计了不同的标定试验以区别普通螺
母和自锁螺母对螺栓标定曲线的影响。
2 试验方案
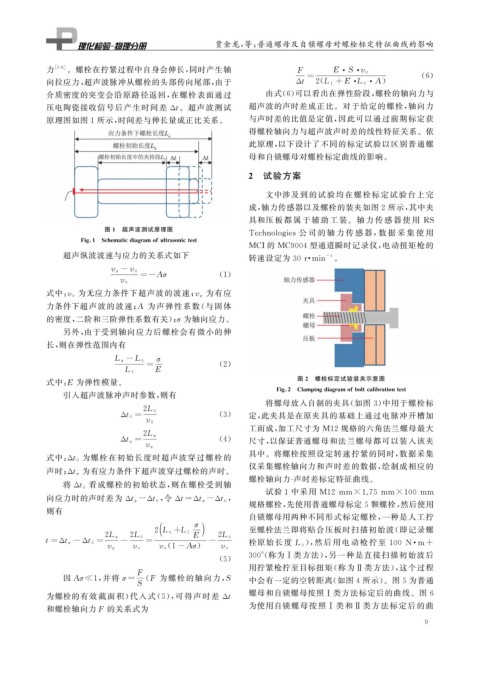
文中涉及到的试验均在螺栓标定试验台上完
成, 轴力传感器以及螺栓的装夹如图 2 所示, 其中夹
具和压 板 都 属 于 辅 助 工 装。 轴 力 传 感 器 使 用 RS
图 1 超声波测试原理图
Technolo g ies 公 司 的 轴 力 传 感 器, 数 据 采 集 使 用
Fi g 1 Schematicdia g ramofultrasonictest
MCI的 MC9004 型通道瞬时记录仪, 电动扭矩枪的
超声纵波波速与应力的关系式如下 转速设定为 30r · min 。
-1
v σ -v 0
=-Aσ ( 1 )
v 0
为有应
式中: v 0 为无应力条件下超声波的波速; v σ
力条件下超声波的波速; A 为声弹性系数( 与固体
的密度, 二阶和三阶弹性系数有关); σ 为轴向应力。
另外, 由于受到轴向应力后螺栓会有微小的伸
长, 则在弹性范围内有
σ
L σ -L 0
= ( 2 )
L 1 E
图 2 螺栓标定试验装夹示意图
式中: E 为弹性模量。
Fi g 2 Clam p in gdia g ramofboltcalibrationtest
引入超声波脉冲声时参数, 则有
将螺母放入自制的夹具( 如图 3 ) 中用于螺栓标
2L 0
Δ t 0 = ( 3 ) 定, 此夹具是在原夹具的基础上通过电脉冲开槽加
v 0
工而成, 加工尺寸为 M12 规格的六角法兰螺母最大
2 L σ
Δ t σ = ( 4 ) 尺寸, 以保证普通螺母和法兰螺母都可以装入该夹
v σ
具中。将螺栓按照设定转速拧紧的同时, 数据采集
为螺栓在初始长度时超声波穿过螺栓的
式中: Δt 0
仪采集螺栓轴向力和声时差的数据, 绘制成相应的
为有应力条件下超声波穿过螺栓的声时。
声时; Δ t σ
螺栓轴向力 - 声时差标定特征曲线。
看成螺栓的初始状态, 则在螺栓受到轴
将 Δt 0
试验 1 中采用 M12 mm×1.75 mm×100 mm
,
规格螺栓, 先使用普通螺母标定 5 颗螺栓, 然后使用
向应力时的声时差为 Δt σ -Δt 0 , 令 Δt=Δt σ -Δt 0
则有
自锁螺母用两种不同形式标定螺栓, 一种是人工拧
σ 至螺栓法兰即将贴合压板时扫描初始波( 即记录螺
2L 0
2L 0 + L 1
2 L σ E 2L 0
t=Δ t σ -Δ t 0 = - = - 栓原始 长 度 L 0 ), 然 后 用 电 动 枪 拧 至 100 N · m+
(
v σ v 0 v 0 1-Aσ ) v 0
300° ( 称为 Ⅰ 类方法), 另一种是直接扫描初始波后
( 5 )
用拧紧枪拧至目标扭矩( 称为 Ⅱ 类方法), 这个过程
F
因 Aσ≪1 , 并将σ= ( F 为螺栓的轴向力, S 中会有一定的空转距离( 如图 4 所示)。图 5 为普通
S
为螺栓的有效截面积) 代入式 ( 5 ), 可得声时差 Δ t 螺母和自锁螺母按照 Ⅰ 类方法标定后的曲线。图 6
为使用自锁螺母按照 Ⅰ 类和 Ⅱ 类方法标定后的曲
和螺栓轴向力F 的关系式为
9