
Page 32 - 理化检验-物理分册2023年第一期
P. 32
刘 越, 等: 基于数字图像相关技术的鼓风机叶片动态应变试验
采用双目立体视觉测量技术, 实现了双目叶片图像
的立体匹配。
基于双目立体视觉原理 [ 8-9 ] 和数字图像相关法,
并结合振动学理论, 笔者研究了鼓风机叶片在振动
过程中的变形及动态应变, 同时采用激光测振仪进
行位移测量和控制反馈, 结果可为叶片的安全运行
提供技术支持。
1 三维 DIC技术
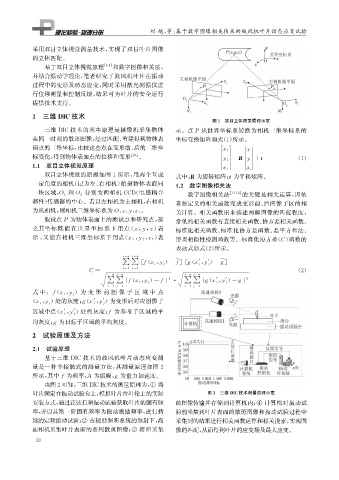
图1 双目立体视觉原理示意
三维 DIC 技术的基本原理是摄像机采集物体 示。点P 从世界坐标系转换为相机三维坐标系的
在同一时刻的散斑图像, 经过匹配、 重建得到物体表 坐标变换矩阵如式( 1 ) 所示。
面点的三维坐标, 比较这些点在变形前、 后的三维坐
x 1
x
标变化, 得到物体表面点的位移和变形 [ 10 ] 。
+ t ( 1 )
1.1 双目立体视觉原理
z
z 1
y 1 = R y
双目立体视觉的原理如图1所示, 用两个互成 式中: R 为旋转矩阵; t 为平移矩阵。
一定角度的相机( 记为左、 右相机) 拍摄物体表面同 1.2 数字图像相关法
分别为两相机 CCD ( 电感耦合
一块区域, O 1 和 O 2 数字图像相关法 [ 11-12 ] 的关键是相关运算, 即依
器件) 传感器的中心。若以左相机为主相机, 右相机 靠预定义的相关函数完成变形前、 后图像子区的相
。
为从相机, 则相机三维坐标系为O 1 x 1 y 1 z 1 关计算。相关函数用来描述两幅图像的匹配程度,
假设点P 为物体表面上的测试点和研究点, 那
常见的相关函数有直接相关函数、 协方差相关函数、
么其坐标既能在世界坐标系下用点 ( x , , z ) 表 标准化相关函数、 标准化协方差函数、 差平方和法、
y
, , ) 表
示 , 又能在相机三维坐标系下用点( x 1 y 1 z 1 序贯相似性检测函数等。标准化协方差( C ) 函数的
表达式如式( 2 ) 所示。
i = n j = n
∑∑ , i y j
f x i y j -f g x' , ' - g
i = 1j = 1
C= ( 2 )
i = n j = n i = n j = n
f x i y j -f ·
g x' , ' - g
∑∑ , 2 ∑∑ i y j 2
i = 1j = 1 i = 1j = 1
式 中: , 为 变 形 前 图 像 子 区 域 中 点
f x i y j
g
, 处的灰度; x' , ' 为变形后对应图像子
x i y j
i y j
区域中点 x' , ' 处的灰度; 为参考子区域的平
f
i y j
均灰度; 为目标子区域的平均灰度。
g
2 试验原理及方法
2.1 试验原理
基于三维 DIC 技术的鼓风机叶片动态应变测
量是一种非接触式的测量方法, 其测量原理如图 2
所示, 其中 f 为频率, A 为振幅, 为重力加速度。
g
由图2可知, 三维 DIC技术的测量原理为: ① 将
叶片固定在振动试验台上, 模拟叶片在叶轮上的实际 图2 三维 DIC技术测量原理示意
安装方式, 通过正弦扫频振动试验获取叶片的固有频 的图像传输并存储到计算机内; ④ 计算机对振动试
率, 并以其第一阶固有频率为振动激励频率, 进行持 验前采集到叶片表面的散斑图像和振动试验过程中
续的定频振动试验; ② 在辅助照明系统的照射下, 高 采集到的结果进行相关函数运算和相关搜索, 实现图
速相机采集叶片表面的系列散斑图像; ③ 将所采集 像的匹配, 从而得到叶片的应变场及最大应变。
2 0